引言
前兩天是投影的理論部分,今天來實作看看吧!順便實驗看看昨天所說的「飛機」理論~
還沒有設定IDE的讀者們,也可以趁機安裝自己想使用的IDE,對於這次的主題建議大家使用IDE來寫程式,畢竟到時候會是比較多檔案的專案,使用IDE可以避免要自己寫Makefile...
再跟大家說明一下,我使用的是Code::Blocks 16.01版本,大家也可以選擇跟我一樣的IDE,如果您是有基礎的Programmer,也可以選用自己習慣、愛用的囉!
新建專案(未來文章會簡化這些前置過程)
首先新建一個專案,然後添加一個"main.c"檔:
引入必須的標頭檔:
#include<stdio.h> // 標準輸入輸出
#include<stdlib.h> // 標準函式庫
#include<stdio.h> // 標準輸入輸出
#include<stdlib.h> // 標準函式庫
double esd; // 眼睛到螢幕的距離(Eyes to Screen Distance),也稱視野距離
int main()
{
double x_3d = 0.0; // 原三維座標X分量
double y_3d = 0.0; // 原三維座標Y分量
double z_3d = 0.0; // 原三維座標Z分量
int bx = 0; // 轉換後二維座標的X座標(螢幕上座標必須使用整數,文字的像素只有整數個)
int by = 0; // 轉換後二維座標的Y座標(同上)
return 0;
}
for(;;)
{
printf("輸入3D座標:\n");
scanf("%lf %lf %lf", &x_3d, &y_3d, &z_3d); // %lf是接收double型態變數的參數
}
int projectTo2d_x(double x, double y, double z) // 三維座標投影到二維座標 - X分量
{
double ax = x; // 已知的,實際上三維物體偏離中央的距離(ax)
double eod = z; // 眼睛到物體的Z軸距離(Eyes to Object Distance)
double result = ax * (esd / eod); // 套入公式
return round(result); // 四捨五入(必須為整數傳出),數學函數,需引入"math.h"標頭檔(見下一項)
}
int projectTo2d_y(double x, double y, double z) // 三維座標投影到二維座標 - Y分量
{
double ay = y;
double eod = z;
double result = ay * (esd / eod);
return round(result);
}
#include<math.h>
esd = 10.0; // 視野距離設為10
for(;;)
{
printf("輸入3D座標:\n");
scanf("%lf %lf %lf", &x_3d, &y_3d, &z_3d);
//新增部分
bx = projectTo2d_x(x_3d, y_3d, z_3d); // 轉換
by = projectTo2d_y(x_3d, y_3d, z_3d);
printf("原3D座標:(%f, %f, %f)\n", x_3d, y_3d, z_3d);
printf("轉換後2D座標:(%d, %d)\n", bx, by);
//---
}
#include<stdio.h>
#include<stdlib.h>
#include<math.h>
double esd = 0.0;
int projectTo2d_x(double x, double y, double z)
{
double ax = x;
double eod = z;
double result = ax * (esd / eod);
return round(result);
}
int projectTo2d_y(double x, double y, double z)
{
double ay = y;
double eod = z;
double result = ay * (esd / eod);
return round(result);
}
int main(int argc, char *argv[])
{
double x_3d = 0.0;
double y_3d = 0.0;
double z_3d = 0.0;
int bx = 0;
int by = 0;
esd = 10.0;
for(;;)
{
printf("輸入3D座標:\n");
scanf("%lf %lf %lf", &x_3d, &y_3d, &z_3d);
bx = projectTo2d_x(x_3d, y_3d, z_3d);
by = projectTo2d_y(x_3d, y_3d, z_3d);
printf("原3D座標:(%f, %f, %f)\n", x_3d, y_3d, z_3d);
printf("轉換後2D座標:(%d, %d)\n", bx, by);
}
return 0;
}
完成後可以按下編譯、執行,看看轉換結果如何吧!
實驗
我們來實際測試看看兩種情況吧!
X, Y座標固定,Z座標逐漸變大: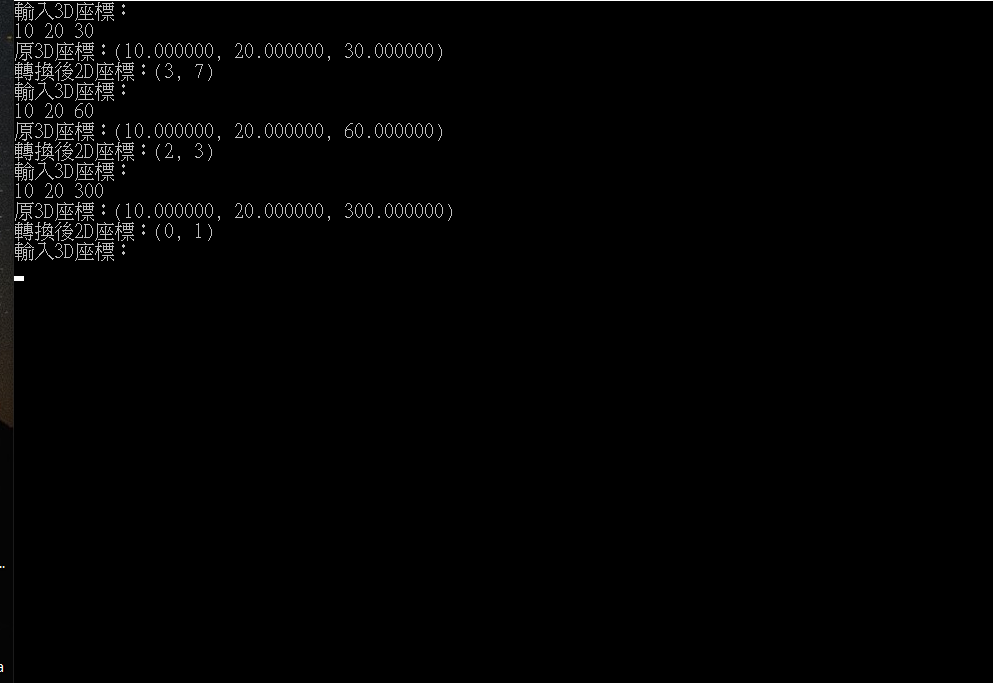
若以(0, 0)為原點,我們可以觀察到雖然三者都在第一象限,但Z座標愈大,X,Y變化愈小,愈靠近原點。
Z座標固定,將Y座標逐漸變大,觀察投影後Y座標變化: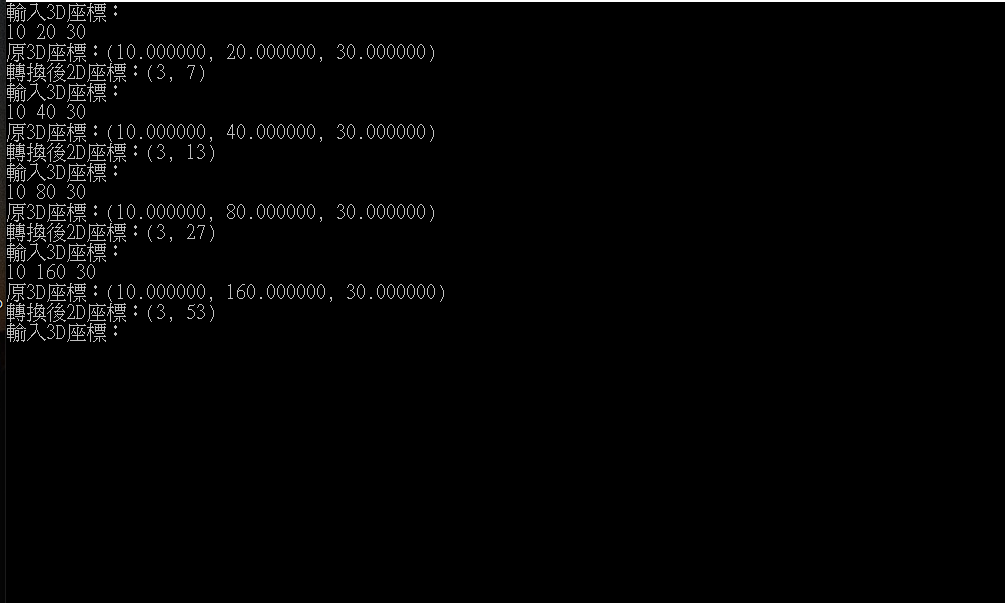
從結果可以觀察出,在視野距離10、Z座標30的情況下,三維座標Y分量每移動20,大約在二維Y分量會移動6。
結語
今天的程式與實驗可以看出三維座標與轉換後二維座標的關係,之後就是利用此原理來打造出3D的引擎~

